Для изучения видов бифуркации желательно разобраться с самим . В общем случае исследование всего фазового пространства на точки бифуркации является сложной задачей для n-мерного пространства, поэтому проводятся локальные исследования, а полученные точки бифуркации называются локальными точками бифуркации . За локальными точками бифуркации можно проследить, наблюдая развитие малых возмущений в системе Бифуркации состояний равновесия и периодических движений на примере шарика. Простейшими и наиболее важными из них являются бифуркации состояний равновесия и периодических движений.
Бифуркация положений равновесия
К основным бифуркациям состояний равновесия относят:- слияние и последующее исчезновение двух состояний равновесия. Примером может служить движение шарика в потенциальной «яме» с «полочкой» (рис. 1). При сглаживании «полочки» BD состояние равновесия «седло» S и центр С 2 сливаются и исчезают (рис. 2).
 Рисунок 1 - Схема движения шарика в «яме» с «полочкой» (а) и его фазовый портрет (б)
Рисунок 1 - Схема движения шарика в «яме» с «полочкой» (а) и его фазовый портрет (б)
 Рисунок 2 - Схема движения шарика после бифуркации (а) и его фазовый портрет (б)
Рисунок 2 - Схема движения шарика после бифуркации (а) и его фазовый портрет (б)
- Рождение предельного цикла из состояния равновесия. Пример такой бифуркации бифуркация Хопфа .
 (1)
Динамическаия система
Она является упрощенным выражением сложной динамической системы, описываемой функциями x(t)
и y(t)
, которые выражаются через соответствующие полярные координаты:
и называется системой Хопфа.
Система (1) зависит от двух параметров, один из которых λ
будет для нас ключевым, а другой с=const
.
Решения задачи Коши при некоторых заданных начальных значения r(t=0)=r 0
, "phi;(t=0)="phi; 0
при λ < 0
дает нам фазовый портрет и график динамики, изображенные на рис. 3.
(1)
Динамическаия система
Она является упрощенным выражением сложной динамической системы, описываемой функциями x(t)
и y(t)
, которые выражаются через соответствующие полярные координаты:
и называется системой Хопфа.
Система (1) зависит от двух параметров, один из которых λ
будет для нас ключевым, а другой с=const
.
Решения задачи Коши при некоторых заданных начальных значения r(t=0)=r 0
, "phi;(t=0)="phi; 0
при λ < 0
дает нам фазовый портрет и график динамики, изображенные на рис. 3.
 Рисунок 3 - График динамики (а) и фазовый портрет (б)
В данном случае существует единственная особая точка - устойчивый фокус
.
Построим теперь график динамики и фазовый портрет для случая λ > 0 (λ = 4)
(см. рис. 4)
Рисунок 3 - График динамики (а) и фазовый портрет (б)
В данном случае существует единственная особая точка - устойчивый фокус
.
Построим теперь график динамики и фазовый портрет для случая λ > 0 (λ = 4)
(см. рис. 4)
 Рисунок 3 - График динамики (а) и фазовий портрет (б) при λ > 0
Разными цветами изображены развязки при различных начальных условиях. Как видим, после короткого переходного процесса система входит в колебательный режим, причем амплитуда и частота колебаний не зависят от начальных условий (при любых начальных условиях система придет в одно и то же колебательное состояние).
На фазовом портрете решение для разных начальных условий как бы «наматываются» на замкнутую кривую. Эта кривая, к которой при t -> ∞
стремятся решения задачи Коши, является аттрактором и называется предельным циклом
.
Колебательный процесс, описывающий этот предельный цикл, называется автоколебаниями
.
Развязки в виде автоколебаний возможны только в существенно нелинейных динамических системах.
Динамическая система Хопфа
имеет нелинейность в виде куба параметра, причем дополнительная нелинейность накладывается благодаря определению функций x(t)
и y(t)
как выражений тригонометрических функций.
Можно доказать, что для данной динамической системы амплитуда колебаний равна .
Итак, λ = 0
- бифуркационные значения параметра. В этой точке узел теряет устойчивость и вместо него рождается устойчивый предельный цикл.
Данная бифуркация рождения предельного цикла из неподвижной точки называется бифуркацией Хопфа
, а рождение автоколебаний - мягким (при малых изменениях параметра колебания имеют малую амплитуду, которая увеличивается с его ростом). Жесткое рождения автоколебаний - при малых изменениях параметра происходит «выброс» траектории в область притяжения другого аттрактора.
Рисунок 3 - График динамики (а) и фазовий портрет (б) при λ > 0
Разными цветами изображены развязки при различных начальных условиях. Как видим, после короткого переходного процесса система входит в колебательный режим, причем амплитуда и частота колебаний не зависят от начальных условий (при любых начальных условиях система придет в одно и то же колебательное состояние).
На фазовом портрете решение для разных начальных условий как бы «наматываются» на замкнутую кривую. Эта кривая, к которой при t -> ∞
стремятся решения задачи Коши, является аттрактором и называется предельным циклом
.
Колебательный процесс, описывающий этот предельный цикл, называется автоколебаниями
.
Развязки в виде автоколебаний возможны только в существенно нелинейных динамических системах.
Динамическая система Хопфа
имеет нелинейность в виде куба параметра, причем дополнительная нелинейность накладывается благодаря определению функций x(t)
и y(t)
как выражений тригонометрических функций.
Можно доказать, что для данной динамической системы амплитуда колебаний равна .
Итак, λ = 0
- бифуркационные значения параметра. В этой точке узел теряет устойчивость и вместо него рождается устойчивый предельный цикл.
Данная бифуркация рождения предельного цикла из неподвижной точки называется бифуркацией Хопфа
, а рождение автоколебаний - мягким (при малых изменениях параметра колебания имеют малую амплитуду, которая увеличивается с его ростом). Жесткое рождения автоколебаний - при малых изменениях параметра происходит «выброс» траектории в область притяжения другого аттрактора.
- Рождение из одного равновесного состояния трех состояний равновесия - спонтанное нарушение симметрии. Например, при движении шарика в желобе при условии появления в нем бугорка появляется бифуркация, при которой из вырожденного состояния типа «центр» возникают три состояния равновесия - седло S и центры С1 и С2 (рис. 4)
 Рисунок 4 - Рождения из одного состояния равновесия трех при малом изменении параметра (формы желоба):
а) форма желоба с одним минимумом и соответствующий фазовый портрет с одним состоянием равновесия типа «центр»;
б) форма желоба с двумя минимумами и соответствующий фазовый портрет с тремя состояниями равновесия: «седло» S и «центры» С1 и С2
Рисунок 4 - Рождения из одного состояния равновесия трех при малом изменении параметра (формы желоба):
а) форма желоба с одним минимумом и соответствующий фазовый портрет с одним состоянием равновесия типа «центр»;
б) форма желоба с двумя минимумами и соответствующий фазовый портрет с тремя состояниями равновесия: «седло» S и «центры» С1 и С2
Бифуркации рождения (гибели) периодического движения
Всем бифуркация рождения или гибели состояний равновесия соответствует прохождение одного или нескольких корней через ноль. Такая возможность проиллюстрирована на рис. 5, где изображена гибель двух состояний равновесия типа «седла» и «узла». Аналогичная бифуркация встречается в задачах о конкуренции видов Х1 и Х2, питающихся из одного источника. Соответствующая динамическая система, описывающая численность популяций, задается уравнениями: При ρ 1,2 > 1 в системе возможна «победа» одного из видов. При уменьшении любого из параметров ρ 1,2 до значения, меньшего от 1, при любых начальных условиях будет выживать только один вид (рис. 5, б).
При ρ 1,2 > 1 в системе возможна «победа» одного из видов. При уменьшении любого из параметров ρ 1,2 до значения, меньшего от 1, при любых начальных условиях будет выживать только один вид (рис. 5, б).
 Рисунок 5 - Фазовые портреты численности популяций, а) при ρ 1 < 1
, ρ 2 > 1
; б) при ρ 1,2 > 1
Рисунок 5 - Фазовые портреты численности популяций, а) при ρ 1 < 1
, ρ 2 > 1
; б) при ρ 1,2 > 1
Бифуркации смены устойчивости периодических движений
Весомая характеристика бифуркации устойчивости - значения мультипликаторов в критический момент, являющихся коэффициентами усиления (затухания) малых возмущений на фоне периодического движения за период Т. В автономной системе один из мультипликаторов всегда равен единице, поэтому в дальнейшем говорим о других. Если все мультипликаторы по модулю меньшие единицы, то начальное периодическое движение устойчиво. Бифуркации, связанные с исчезновением устойчивости, происходят при таких значениях параметров системы, при которых один или несколько из них равны по модулю 1.И средневековый латинский furcatus - раздвоенный, от латинского furca - двузубые вилы), разветвление, раздвоение. В теории колебаний и теории динамических систем бифуркация - это перестройка характера движения реальной системы (физической, химической, биологической), переход её в новое качественное состояние при малом плавном изменении одного или нескольких параметров. Значения параметров, при которых наблюдается бифуркация, называются бифуркационными. Математически бифуркация - это изменение структуры разбиения фазового пространства динамической системы на траектории при малом изменении её параметров.
Теория бифуркации даёт возможность понять как физические явления в механике (поведение частицы в потенциальной яме), оптике (условие возникновения лазерной генерации), теории колебаний (автоколебания), так и некоторые химические процессы (например, колебательные реакции типа реакции Белоусова - Жаботинского). Кроме того, теория бифуркации применима для описания ряда явлений в экологии и динамике популяций, условий сосуществования видов (хищник - жертва), процессов эволюции и мутаций в биологии, взаимодействия и развития социальных систем и др.
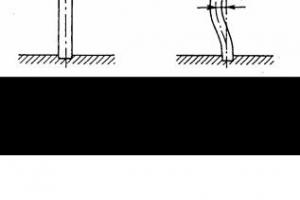
Простейшим примером бифуркации является рассмотренное Л. Эйлером выпучивание в ту или иную сторону вертикально нагруженного стержня при превышении критической нагрузки (рис. 1). Теория бифуркации универсальна. Знание основных типов бифуркации позволяет существенно облегчить исследование реальных систем, предсказать характер новых движений, возникающих в момент перехода системы в качественно другое состояние, оценить их устойчивость и область существования.
Основы теории бифуркации заложены А. Пуанкаре и А. М. Ляпуновым в начале 20 века. Важнейший вклад в её развитие сделан А. А. Андроновым и Л. С. Понтрягиным, которые ввели понятие грубости (структурной устойчивости) динамических систем на плоскости. Грубые системы сохраняют качественную структуру разбиения фазового пространства на траектории при малых изменениях параметров. Нарушение условий грубости происходит при бифуркационных значениях параметров, когда система становится негрубой. Наиболее распространёнными типами поведения систем различного происхождения являются состояния равновесия и периодического движения. Математическим образом периодического движения является предельный цикл. Теория бифуркации для систем, обладающих состояниями равновесия и предельными циклами, разработана в основном А. А. Андроновым и его учениками.

Система находится в устойчивом состоянии (состоянии устойчивого равновесия), если при малом отклонении от него она возвращается вновь к этому состоянию (рис. 2а). В этом смысле такие положения равновесия словно притягивают к себе, поэтому они называются аттракторами (от английский attract - притягивать). Каждый аттрактор имеет свою область притяжения - множество начальных условий (координат и скоростей шарика, как на рисунке 2а), при отклонении от которых система с течением времени возвращается в это же состояние. Система находится в состоянии неустойчивого равновесия, если при малом отклонении от него она не возвращается в это состояние (рис. 2б).
Система, находящаяся в устойчивом стационарном состоянии, может испытывать бифуркацию, когда оно теряет устойчивость, например сливается с неустойчивым (рис. 3а-в). В этом случае с переходом параметра через бифуркационное значение (рис. 3б) система скачком переходит в другую область, удалённую от исходной (рис. 3в).

Бифуркация, при которой состояние устойчивого равновесия системы, наблюдаемое до перехода параметра через точку бифуркации, сменяется устойчивым периодическим движением, была исследована А. А. Андроновым и Э. Хопфом и носит их имя. Другой тип бифуркации Андронова - Хопфа - это жёсткое возбуждение, когда параметр системы изменяется так, что неустойчивый предельный цикл стягивается к стационарному устойчивому состоянию и в момент бифуркации сливается с ним. При этом область притяжения стационарного состояния системы и размеры предельного цикла уменьшаются до нуля, так что система теряет устойчивость и скачком переходит на другой режим движения.
Устойчивое периодическое движение также может претерпеть бифуркацию, либо слившись с неустойчивым периодическим движением, либо потеряв свою устойчивость. В последнем случае из периодических движений могут возникнуть периодические движения удвоенного периода или квазипериодические колебания (так называемый двумерный инвариантный тор). Квазипериодические колебания - это движения с двумя или более несоизмеримыми (рационально независимыми) частотами. Такие колебания наблюдаются, например, в системе двух связанных маятников с частотами ω 1 и ω 2 при ω 1 /ω 2 ≠ k/m, где k и m целые числа.
В нелинейных системах при изменении параметров допустима конечная (или даже бесконечная) последовательность бифуркаций, приводящая к появлению динамического хаоса (смотри также Странный аттрактор).
Лит.: Андронов А. А. и др. Теория бифуркаций динамических систем на плоскости. М., 1967; Арнольд В. И. и др. Теория бифуркаций // Современные проблемы математики. Фундаментальные направления. М., 1986. Т. 5; Лоскутов А.Ю., Михайлов А. С. Введение в синергетику. М., 1990.
Во многих областях знаний (биология, география, педагогика) термин «бифуркация» обозначает «раздвоение», «разделение». В нелинейной динамике термин «бифуркация» трактуется более широко - это качественное изменение состояния системы при малом изменении управляющих параметров. Определение из Универсальной энциклопедии» Кирилла и Мефодия: Бифуркация, приобретение нового качества в движениях динамической системы при малом изменении ее параметров. Основы теории бифуркации заложены А. Пуанкаре и А. М. Ляпуновым в нач. XX века, затем эта теория была развита А.А. Андроновым и учениками. Знание основных бифуркаций позволяет существенно облегчить исследование реальных систем (физических, химических, биологических и др.), в частности предсказать характер новых движений, возникающих в момент перехода системы в качественно другое состояние, оценить их устойчивость и область существования.
В качестве примера рассмотрим простую механическую систему: шарик, катающийся по желобу, профиль которого определяется с помощью соотношения:
(8.1) у(х) = х 4 + ах 2 + bх
Соответствующий график, поясняющий рассматриваемую систему, представлен на рис. 8.1. Здесь х - переменная, которая однозначно определяет местоположение шарика (а, следовательно, состояние системы в рассматриваемый момент времени), а и b - управляющие параметры, определяющие профиль рассматриваемого желоба. При изменении величин управляющих параметров а и b изменяется профиль желоба, что влечет за собой изменение состояния системы - меняется местоположение равновесного состояния, шарик смещается в новое положение равновесия (происходит изменение величины переменной х ). Таким образом, меняя управляющие параметры а и b , мы можем изменять состояние системы.
Рис. 8.1. Шарик в потенциальной ямке (а = –0,8; b = 1). Координата х 0 определяет местоположение шарика, параметры а и b - профиль желоба
Все возможные значения управляющих параметров можно представить себе, как плоскость (а, b ), называемую плоскостью управляющих параметров. Любая точка на этой плоскости однозначно соответствует одному, вполне определенному виду профиля желоба, по которому катается шарик. И наоборот, любой желоб вида (8.1) может быть поставлен в соответствие точке на плоскости (а, b ). Если бы управляющих параметров было не два, а больше (например, три), то речь бы шла о пространстве параметров. Вернемся, однако, к понятию «бифуркация». Речь идет о том, что при малых изменениях значений управляющих параметров происходит качественное изменение состояния системы. Подчеркнем два важных момента: малые изменения значений управляющих параметров и качественное изменение состояния системы. Иными словами, всякое (малое) изменение управляющих параметров, конечно же, приводит к изменению состояния системы, но если отличия между начальным и конечным состояниями качественным образом не отличаются, то нельзя говорить о бифуркации.
Поясним сказанное на примере шарика в потенциальной ямке. На рис. 8.2 приведена плоскость управляющих параметров (а, b ), и в некоторых точках показан профиль желоба, по которому может кататься шарик. Из рисунка видно, например, что в точках 3 и 4 плоскости параметров профили желоба, конечно же, отличаются друг от друга, но это отличие носит количественный, а не качественный характер. Качественно же оба эти профиля подобны: они имеют один минимум, а, следовательно, одно состояние устойчивого равновесия. В то же самое время, на плоскости параметров существует область (ограниченная пунктирными линиями), в которой желоб имеет три состояния равновесия. Желоб имеет три точки, в которых шарик может находиться в состоянии равновесия; два из этих состояний устойчивы, а одно - неустойчивое.

Рис. 8.2. Плоскость управляющих параметров (а, b ) и вид потенциальной ямы в некоторых точках плоскости параметров
Если шарик будет находиться в состоянии неустойчивого равновесия (рис. 8.3), то любые сколь угодно малые воздействия на него (а такие воздействия рано или поздно обязательно реализуются) выведут шарик из этого состояния равновесия, и он скатится в одну из ямок - либо левую, либо правую. И в левой, и в правой ямках шарик будет находиться в состоянии устойчивого равновесия сколь угодно долго. В какую из двух этих ямок шарик попадет - определяется волей случая. Подобные системы, в которых возможно несколько устойчивых состояний (из которых реализуется, естественно, только одно), называются мультистабильными, а само явление - мультистабильностью.

Рис. 8.3. Система, находящаяся в состоянии неустойчивого равновесия. Незначительные воздействия на систему извне с неизбежностью приведут к тому, что система перейдет в устойчивое состояние равновесия
Понятно, что желоб с двумя ямками (и тремя состояниями равновесия) качественно отличается от желоба с одним состоянием равновесия. Переход от одного состояния к другому, качественно иному, как нетрудно догадаться, осуществляется на пунктирных линиях (см. рис. 8.2). Если на плоскости управляющих параметров достаточно близко «подойти» к пунктирной линии, то затем, слегка изменив управляющий параметр, можно пересечь эту линию, что приведет к качественной перестройке всей системы. Произойдет то, что и называется бифуркацией: качественное изменение состояния системы при малом изменении управляющих параметров. Линию, при пересечении которой происходит бифуркация, называют линией бифуркации, а значения параметров, при которых наблюдается бифуркация - бифуркационными параметрами.
Рассмотрим теперь суть происходящих явлений с точки зрения шарика, который находится в желобе. Пусть управляющие параметры а и b медленно изменяются в соответствии с тем, как это показано стрелкой на рис. 8.4. В соответствии с изменением управляющих параметров, профиль желоба непрерывно изменяется. В точке 1 плоскости параметров желоб имеет одно устойчивое состояние равновесия, в котором и находится шарик. При пересечении пунктирной линии в точке 2 у желоба возникает еще один минимум и один максимум, т.е. появляются еще два состояния равновесия, одно из которых устойчивое (минимум), а другое - нет. По мере дальнейшего движения по плоскости параметров по указанному маршруту второй минимум становится все более глубоким (точка 3) и при достижении точки 4 глубина обеих ямок желоба оказывается одинаковой. В этом случае оба состояния равновесия «равноправны». Заметим, однако, что шарик до сих пор даже «не заметил» появления второго состояния равновесия, в котором он вполне мог бы находиться. Для шарика почти ничего не изменилось: он как находился в ямке, так и продолжает там оставаться. Да, с изменением управляющих параметров изменяется координата х 0 равновесного состояния, а, следовательно, и координата местонахождения шарика, но это изменение столь незначительное, что шарик не придает ему особого значения. Плавные, малые изменения незаметны и кажутся неважными.

Рис. 8.4. Изменение состояния системы при движении по плоскости параметров в направлении, показанном стрелкой
Действительно, задумываемся ли мы каждое утро над тем, что стали на день старше? Обращаем ли мы внимание на то, что 15 января продолжительность дня была 7 ч 39 мин, а 16 января - 7 ч 42 мин? Замечаем ли осенним днем, что листья стали еще чуть-чуть желтее, чем были накануне? Так незаметно накапливаются малые изменения, на которые мы не обращаем внимания. Малое изменение координаты состояния равновесия от точки к точке при движении по плоскости управляющих параметров - вещь столь незначительная и неважная, что шарик не обращает на это никакого внимания. Наверное, шарику вполне могло бы показаться интересным и важным появление второго возможного состояния, в котором он мог бы находиться, но это второе состояние остается невидимым для шарика, оно скрыто от него высокими стенками желоба, и шарик о его существовании просто-напросто не догадывается.
Продолжим движение по плоскости управляющих параметров. В точке 5 глубина второго, «альтернативного» минимума превосходит глубину того минимума, в котором находится шарик, да и ширина второго минимума тоже больше, чем ширина первого. Понятно, что второе устойчивое состояние равновесия теперь уже более предпочтительно, нежели первое. Тем не менее, шарик по-прежнему «живет» в первом состоянии равновесия, и для него по-прежнему, по большому счету, ничего не изменилось. Второе состояние равновесия по-прежнему для него невидимо. Хотя теперь шарик может, если обратит внимание, по косвенным признакам определить, что в системе что-то изменилось: стали не столь крутыми стенки ямки, в которой он находится, да и глубина ямки, кажется, стала поменьше. Но сможет ли шарик за этими незначительными изменениями (которые являются предвестниками дальнейших событий) увидеть нечто более серьезное, чем некоторое изменение окружающей его среды, сможет ли он понять, что его теперешнее состояние равновесия находится под угрозой, зависит от его, шарика, «прозорливости». В подобной простой механической системе, наверное, это не очень сложно, особенно если у шарика есть некоторый опыт, т.е. если он несколько раз уже бывал в подобных ситуациях. Ведь еще небольшое движение, незначительное изменение управляющих параметров, и состояние равновесия, в котором очень долгое время находился шарик, исчезнет (точка 6), и шарик будет переброшен в совершенно иное состояние.
Приведем другой классический пример бифуркации, рассмотренный еще великим Эйлером. Нам понадобится измерительная линейка, тонкий столовый нож, полотно от ножевки, длинная пластмассовая расческа и т.п. Поставьте ее вертикально на твердое основание, а сами, обезопасив руку от травмы, начинайте давить на нее вниз (рис. 8.5). Увеличивая усилие F , вы обнаружите, что при F бо льших некоторого значения F b полоска не сохраняет первоначальную прямолинейную форму (рис 8.5а) - это состояние теряет устойчивость, а вместо него возможно одно из двух других состояний (1 или 2 на рис 8.5б), когда полоска искривлена. Причем, какое состояние установится, зависит от разных незначительных факторов (первоначальной деформации полоски, отклонением от вертикали приложенной силы, вибрациями и т.п.). Здесь F - управляющий параметр, F b - его бифуркационное значение.

Рис. 8.5. Опыт с линейкой: а) состояние линейки до бифуркации (величина F меньше бифуркационного значения); б) два возможных устойчивых состояния, в которые переходит система при превышении силой F бифуркационного значения F b ; в) соответствующая бифуркационная диаграмма
Происходящее в рассмотренной системе удобно иллюстрировать с помощью графиков (рис. 8.5в, где х - отклонение средней точки полоски от вертикали) - бифуркационных диаграмм. На рисунке по горизонтали отложены значения параметра, а по вертикали соответствующие им значения переменной, установившиеся в системе (т.е. это - и не фазовая плоскость и не плоскость параметров, а нечто комбинированное). На диаграмме видно, что вместо одного состояния, отмеченного цифрой 0, после бифуркации существуют и могут быть реализованы на практике состояния 1 и 2. Что касается состояния 0, то оно продолжает в принципе существовать и при значениях F , бо льших бифуркационного, но не может быть практически реализовано из-за его неустойчивости.
Понятно, что события, подпадающие под определение «бифуркация» (качественное изменение состояния системы при малых изменениях управляющих параметров), вполне можно отыскать и в социальных системах. Примером может служить революция, коренным образом перестраивающая привычную жизнь человеческого общества. Возможны и менее «глобальные» примеры. Человек работает-работает где-либо, и вдруг ни с того ни с сего, вроде бы из-за пустяка говорит: «А гори она огнем, вся эта шарага» и пишет заявление об увольнении. Система переходит в другое, качественно иное состояние.
Следует, однако, отметить следующий аспект: социальные системы чрезвычайно сложны, и поэтому следует помнить о том, что применять существующие в нелинейной динамике понятия к подобным системам (в том числе и понятия «бифуркация», «мультистабильность») следует с осторожностью, памятуя о том, что простой механический перенос может привести к ошибкам, а порой и к фальсификации. Когда речь идет о шарике в потенциальной яме, совершенно понятно, о каких возможных состояниях системы идет речь, какие из них устойчивые, какие нет, наконец, какое состояние реализуется в настоящий момент времени. Но что понимать под возможными состояниями социальной системы? Реализующееся состояние в данный момент времени - единственное, про остальные состояния, «существуют» они (точнее говоря, могли ли они осуществиться вместо теперешнего) или нет, остается только гадать, и наши догадки останутся догадками, о достоверности которых мы тоже можем делать свои заключения, но не более. Понятие «мультистабильность», по всей видимости, может быть применено к социальными системам, но вот «экспериментально» проверить существование мультистабильности в социальных системах, наверное, невозможно. Невозможно показать, что для какого-либо фиксированного момента времени (например, сегодняшнего) помимо того состояния, которое реализуется, «существует» еще одно (или несколько) альтернативных состояний, каждое из которых могло с той или иной вероятностью реализоваться. Предполагать это можно, но экспериментально проверить - нет. И конечно, «увидеть», «почувствовать», что социальная система приближается к точке бифуркации, за которой возникнет качественно другое состояние, существенно сложнее. И если мы видели, что шарик, находящийся в потенциальной ямке, практически до самого последнего момента не «видит» надвигающейся бифуркации (и перехода системы в иное состояние), что говорить о людях и о социальных системах. Н.С. Хрущев, например, не заметил приближение системы к точке бифуркации, отправляясь из отпуска на Пленум ЦК в октябре 1964 года, по результатам которого он был освобожден от должности Первого секретаря ЦК и выведен из состава Президиума, а на следующий день - от должности Председателя Совета Министров СССР. И Гай Юлий Цезарь в 44 году до н.э. также не заметил надвигающейся бифуркации, за что поплатился жизнью.
Обратим внимание еще на один важный аспект, связанный с понятием «бифуркация». В тот момент, когда система (по параметрам) находится вблизи точки бифуркации, очень большую роль начинают играть малые возмущения. Эти возмущения могут носить случайный характер или могут быть целенаправленными, но их роль существенно возрастает. Вернемся к шарику в потенциальной ямке и рассмотрим два состояния системы: вдали и вблизи от точки бифуркации (рис. 8.6). Видно, что когда система находится вдали отточки бифуркации, малые воздействия на нее не приводят к существенным изменениям ее состояния: шарик остается в том же самом положении, как и раньше. Для того чтобы «перебросить» систему в другое возможное состояние, необходимо приложить гораздо бо льшие усилия. В то же самое время, когда система находится вблизи точки бифуркации, даже малого воздействия (которого раньше система просто-напросто не заметила бы) достаточно, чтобы перевести систему из одного состояния в другое.

Рис. 8.6. Система «шарик в потенциальной ямке» вдали и вблизи от точки бифуркации
Итак, вблизи точки бифуркации малые воздействия на систему могут привести к несоизмеримо большим «откликам». Еще одним фактором, который может привести к изменению состояния системы, является малое изменение управляющих параметров. Если система близка к точке бифуркации, то легкое «шевеление» управляющих параметров может привести к тому, что система окажется уже за границей бифуркации (как говорят, в закритической области), и система сама, уже безо всяких внешних воздействий, перейдет в новое состояние. На примере шарика в желобе, после пересечения бифуркационной линии в точке 6 (см. рис. 8.4), устойчивое состояние равновесия, в котором до этого момента находился шарик, сливается с неустойчивым и исчезает, а, следовательно, шарику ничего более не остается, как «перейти» к другому состоянию равновесия.
Примеров подобному поведению систем вблизи линии бифуркации много. По всей видимости, ряд операций на финансовых и фондовых рынках также можно использовать в качестве примера. Организованные действия группы лиц, заинтересованных в проведении той или иной финансовой операции, проведенные в нужный момент, приводят к тому, что либо на систему, находящуюся около состояния бифуркации, оказывается воздействие, выводящее ее из состояния равновесия, либо происходит малое шевеление управляющих параметров, и система оказывается в закритической области. В результате происходит переход системы в новое состояние, например, контрольный пакет акций оказывается у заинтересованного лица. Но если подобную операцию проводить в тот момент, когда система далека от состояния бифуркации, можно затратить большие средства, но желаемого результата не достичь.
Таким образом, воздействуя на систему, находящуюся вблизи бифуркационного состояния, можно добиться кардинальных изменений. Другое дело, что социальные системы - это не шарик в желобе. Определить, когда система приближается к точке бифуркации - сложная задача. Но не менее сложная и не менее важная задача, если возникает желание управлять подобным образом социальными системами, - это определить, в какое состояние перейдет система после того, как она покинет состояние равновесия.
Не стоит, однако, думать, что бифуркация - это всегда какое-либо резкое изменение, когда система изменяется до неузнаваемости. Пример бифуркации с сосуществующими положениями равновесия, описанный выше - один из самых простых. Вообще, в теории бифуркаций существует достаточно большое число различных типов бифуркационных ситуаций. Так, например, различают бифуркации и катастрофы; существует даже теория катастроф. Следует подчеркнуть, что бифуркации могут происходить плавно, подчас незаметно. Пересечение пунктирной линии в точке 2 на рис. 8.4 приводит к тому, что система качественно изменяется (меняется число возможных устойчивых состояний равновесия в системе), следовательно, происходит бифуркация. Однако, как уже говорилось, шарик, находящийся в другой ямке, не замечает произошедшей бифуркации. Другой пример с той же самой системой приведен на рис. 8.7. При движении по плоскости управляющих параметров вдоль линии b = 0 в точке a = 0 происходит бифуркация, состояние системы качественно изменяется, однако это изменение происходит плавно, без «катаклизмов». Шарик может заметить, что в системе что-то изменилось, поскольку его координата х 0 вначале (до бифуркации) была равна нулю, а затем стала отличной от нуля. Однако это изменение произошло очень плавно, и ему можно не придать значение.

Рис. 8.7. Изменение состояния системы при движении по плоскости параметров вдоль линии b = 0 в направлении, указанном стрелкой
Но и в этом случае вблизи точки бифуркации малые воздействия на систему играют значительную роль. Именно эти воздействия определяют, в какую из ямок (левую или правую) попадет шарик. Именно эти ничтожные воздействия определяют, по большому счету, дальнейшую судьбу системы. В ситуации, изображенной на рис. 8.7, малые воздействия привели к тому, что шарик оказался в правой ямке. Если, после того как система уйдет от точки бифуркации, потребуется изменить состояние системы, потребуется перебросить шарик в другую ямку, то придется приложить усилия, несоизмеримо больше тех, которые в точке бифуркации определили выбор дальнейшей эволюции системы. Примером такой «мягкой», но заметной бифуркации могут являться демократические выборы. До того момента, пока не прошло голосование, на судьбу дальнейшего развития страны могут повлиять самые незначительные факторы (может быть, вплоть до прически кандидата). После того, как выборы состоялись, изменить что-либо гораздо сложнее.
Недавно опубликована статья И.Пригожина Кость еще не брошена. Послание будущим поколениям. В частности, он пишет следующее. «Будущее не дано нам заранее. Великий французский историк Фернанд Бродель однажды заметил: „События - это пыль". Правильно ли это? Что такое событие? Сразу же приходит аналогия с „бифуркациями", которые изучаются прежде всего в неравновесной физике. Эти бифуркации появляются в особых точках, где траектория, по которой движется система, разделяется на „ветви". Все ветви равно возможны, но только одна из них будет осуществлена. Обычно наблюдается не единственная бифуркация, а целая последовательность бифуркаций... С этой точки зрения история оказывается последовательностью бифуркаций».
Далее И. Пригожин подчеркивает, что за выбор ветви, которая возникает после точки бифуркации, отвечают флуктуации на микроскопическом уровне (они определяют событие, которое произойдет). В применении к обществу (по Пригожину такое применение - метафора) событие представляет собой возникновение новой социальной структуры после прохождения бифуркации, а флуктуации - следствие индивидуальных действий. Таким образом, событие имеет микроструктуру. В качестве примера И. Пригожин рассматривает революцию 1917 года в России, указывая, что конец царского режима мог принять различные формы. Он считает, что ветвь, по которой пошло развитие, была результатом действий «флуктуации», связанной с отсутствием дальновидности у царя, непопулярностью его жены, слабостью Керенского, насилием Ленина. Эта микроструктура и обусловила все последующие события.
«Мое послание будущим поколениям состоит, стало быть, в том, что кость еще не брошена, что ветвь, по которой пойдет развитие после бифуркации, еще не выбрана. Мы живем в эпоху флуктуаций, когда индивидуальное действие остается существенным... Я верю в возникновение необходимых флуктуаций, посредством которых те опасности, которые мы ощущаем сегодня, могли бы быть успешно преодолены».
Исследование качественных математических моделей сопровождается возникновением качественных вопросов, можно разделить на две категории:
- Вопросы, относящиеся к поведению системы при фиксированных значениях параметров; важным при этом является качественное понимание характера режимов, устанавливаемых в системе;
- Вопросы, касающиеся событий, которые происходят в системе при изменении значений параметров. Медленное изменение параметра может привести к тому, что при пересечении некоторого критического значения режим, установившийся в системе, приобретает качественные изменения. При таких перестройках фазовый портрет изучаемой системы, изменяется. Качественные перестройки фазового портрета называются бифуркация .
Задачи теории бифуркаций
Решением вопросов данного типа занимается теория бифуркации, задачами которой являются:- описание всех возможных бифуркации исследуемой системы;
- разбиение множества бифуркационных значений параметров на области с разными типами грубых фазовых портретов;
- построение для каждой области соответствующего фазового портрета.
 Рисунок 1 - Поведение исследуемой системы в случае r<0
Первая точка (слева) устойчива, так как из рис. 1 видно, что функция меняет свой знак с «+» на «-».
Вторая точка - неустойчива, так как из рис. 1 видно, что функция меняет свой знак с «-» на «+».
Рисунок 1 - Поведение исследуемой системы в случае r<0
Первая точка (слева) устойчива, так как из рис. 1 видно, что функция меняет свой знак с «+» на «-».
Вторая точка - неустойчива, так как из рис. 1 видно, что функция меняет свой знак с «-» на «+».
- При r = 0 уравнение (*) имеет один корень. В этой точке, следовательно мы не можем аналитически определить тип устойчивости. Фазовый график представлен на рис. 2.
 Рисунок 2 - Поведение исследуемой системы в случае r = 0
Из анализа графика рис. 2 можно установить, что функция f(x)
при переходе через особую точку не меняет знак, следовательно эта точка является неустойчивой.
Рисунок 2 - Поведение исследуемой системы в случае r = 0
Из анализа графика рис. 2 можно установить, что функция f(x)
при переходе через особую точку не меняет знак, следовательно эта точка является неустойчивой.
- При r > 0 точек равновесия нету:
 Рисунок 3 - Поведение исследуемой системы в случае r > 0
Итак, полустойкие точка равновесия исчезает, как только становится положительным. Так как характеристики точек равновесия меняются со временем, говорят, что динамическая система имеет бифуркацию. В данном случае значение параметра меняются от отрицательных через ноль к положительным и характеристики стационарных точек изменяются так, как показано на рис. 1-3. Следовательно, в точке происходит бифуркация.
Рисунок 3 - Поведение исследуемой системы в случае r > 0
Итак, полустойкие точка равновесия исчезает, как только становится положительным. Так как характеристики точек равновесия меняются со временем, говорят, что динамическая система имеет бифуркацию. В данном случае значение параметра меняются от отрицательных через ноль к положительным и характеристики стационарных точек изменяются так, как показано на рис. 1-3. Следовательно, в точке происходит бифуркация.
Точка бифуркации
Точка бифуркации - это такое состояние системы, при котором даже незначительное возмущение может привести к глобальным изменениям. Аналогично выражения «взмах крыла бабочки привел к урагану в Калифорнии». Рыцарь на распутье - это , космический аппарат, летящий между Землей и Луной и не имеющий необходимой скорости, чтобы выйти из гравитационного поля одной или другой планеты - точка бифуркации. Станет он спутником Земли или Луны, зависит от микроскопических возмущений типа солнечного ветра или микрометеоритов. На фондовом и валютном рынках уровни поддержки или сопротивления являются точками бифуркации. Ценные бумаги или валюта, достигнув их, или сорвутся вниз, либо пойдут вверх и это зависит от очень незначительных факторов. Август 1991 г. - точка бифуркации для СССР. Точи бифуркации часто встречаются в потоках газов и жидкости. Поэтому так трудно предсказать погодные условия. Предсказание погодных условий при помощи точек бифуркации.
Термин «бифуркация» буквально означает «раздвоение», но применяется в более широком смысле для обозначения всех возможных качественных перестроек некоторого объекта при изменении параметра, от которого он зависит. Существуют разные .
В примере для функции
значение параметра ε = 0 соответствует точке бифуркации, так как при переходе ε от отрицательных значений к положительным стационарное состояние х=0
стало неустойчивым и дополнилось парой устойчивых состояний -
при отрицательных значениях ε стационарные состояния вообще отсутствуют, а в точке ε = 0 происходит рождение таких состояний, один из которых устойчив, а другой - неустойчивый. В обоих случаях значения ε = 0 соответствуют точкам бифуркации, хотя и разных типов.
Проблемой исследования точек бифуркации является их классификация и анализ поведения семейств функций вблизи структурно неустойчивых особых точек.
Предсказание погодных условий при помощи точек бифуркации.
Термин «бифуркация» буквально означает «раздвоение», но применяется в более широком смысле для обозначения всех возможных качественных перестроек некоторого объекта при изменении параметра, от которого он зависит. Существуют разные .
В примере для функции
значение параметра ε = 0 соответствует точке бифуркации, так как при переходе ε от отрицательных значений к положительным стационарное состояние х=0
стало неустойчивым и дополнилось парой устойчивых состояний -
при отрицательных значениях ε стационарные состояния вообще отсутствуют, а в точке ε = 0 происходит рождение таких состояний, один из которых устойчив, а другой - неустойчивый. В обоих случаях значения ε = 0 соответствуют точкам бифуркации, хотя и разных типов.
Проблемой исследования точек бифуркации является их классификация и анализ поведения семейств функций вблизи структурно неустойчивых особых точек.