Аннотация : в данной статье приведена ТРИЗ-эволюция систем управления беспилотными летательными аппаратами, начиная с первых и заканчивая современными, с их описанием, техническими противоречиями и возможным дальнейшим развитием.
Ключевые слова : система управления, беспилотный летательный аппарат, БПЛА.
Annotation: In this article we present TRIZ-evolution of control systems of unmanned aerial vehicles, that is starting with the original and ending with the modern, with their description, technical contradictions and possible further development.
Keywords: control system, unmanned aerial vehicle, UAV.
В настоящее время беспилотные летательные аппараты (БПЛА) достаточно сильно развиты и имеют широкий круг применений. За век своего существования БПЛА как увеличились в своих размера до десятков метров, так и уменьшились до нескольких миллиметров; их диапазон скорости, грузоподъёмности тоже существенно расширился.
Однако системы управления БПЛА неизменно развивались и продолжают развиваться. Рассмотрим эволюцию систем управления БПЛА, начиная от систем управления первых беспилотных «воздушных торпед» до систем управления современных беспилотников. Для современных БПЛА ограничимся мини и микро классами аппаратов (вес до 30 кг).
Как всегда бывает, первыми БПЛА разрабатывали военные, и только в XXI веке началось активное развитие БПЛА гражданского назначения.
1. Исторически первый БПЛА .
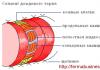
Исторически первым БПЛА считается «Жук» Кеттеринга (см. рис. 1). Это один из первых успешных проектов беспилотного летательного средства. По заказу армии США в 1917 году изобретатель Чарльз Кеттеринг разработал свою экспериментальную беспилотную «воздушную торпеду», которая стала предшественником крылатых ракет. Целью было создать дешёвый и простой беспилотный самолёт-снаряд для армейского авиационного корпуса.
Рисунок 1 – Жук Кеттеринга.
Аппарат получился достаточно компактный, в отличие от «крылатой бомбы» Сперри, разрабатываемой и испытываемой в тоже время. «Жук» имел цилиндрический корпус из дерева, к которому крепилась бипланная V-образная коробка.
Беспилотное средство было оснащено дешёвым четырёхцилиндровым двигателем и инерциальной автоматической системой управления. После старта, питающийся электричеством от двигателя, гироскоп обеспечивал стабилизацию «Жука» по направлению . Гироскоп был соединён с вакуум-пневматическим автопилотом (рис. 2), который осуществлял управление рулём направления. Блок-схема системы управления «Жука» представлена на рисунке 3.

Рисунок 2 – Вакуум-пневматический автопилот (пример)
Управление рулём высоты осуществлялось аналогичным образом, но датчиком в этом случае уже являлся барометрический альтиметр.
Перед стартом на беспилотном аппарате задавали значение высоты и максимальное количество оборотов пропеллера, что соответствовало пройденному расстоянию; раскручивали гироскоп. Запуск происходил с рельсовой катапульты, «Жук» выходил на заданную высоту и летел по прямой в сторону цели. Специальное устройство отсчитывало обороты пропеллера и по достижении нужного расстояния (количества оборотов пропеллера сравнялось с заданным), высвобождался пружинный механизм, который отключал двигатель и выбивал болты, держащие крылья. Корпус аппарата падал вниз и достигал цели.

Рисунок 3 – Блок-схема системы управления
«Жук» Кеттеринга предназначался для обстрела городов, крупных промышленных центров и мест сосредоточения войск противника на дистанции до 120 км. Он успешно прошёл испытания, в отличие от «воздушной торпеды» Сперри, и был прият на вооружение. Система показала себя лучше, успешней и дешевле предыдущих, но Первая мировая война закончилась, и заказ так и не был выполнен . Всего было изготовлено 45 машин.
У «Жука» Кеттеринга были реализованы простейшие функции автопилота: управление рулём высоты и рулём направления, отсчитывание пройдённого расстояния, отключение двигателя и сброс крыльев. Неудачи в испытаниях были связаны с проблемами удержания аппарата на курсе. Аппарат мог отклониться от курса как при запуске с рельсовой катапульты, так и во время полёта. Кроме того, «воздушная торпеда» под действием ветра могла завалиться на крыло и упасть. Примитивный автопилот хоть и пытался придерживаться курса, но с сильными порывами ветра или ошибкой при запуске справиться не мог.
Представим алгоритм управления «Жука» Кеттеринга:
1) Перед стартом задавались максимальная высота и число оборов пропеллера.
2) Происходил запуск с рельсовой катапульты.
3) Аппарат выходил на заданную высоту (контроль высоты осуществлялся с помощью барометрического альтиметра).
4) Автопилот поддерживал неизменный курс благодаря воздействию гироскопа (полёт представлял собой движение по прямой).
5) При достижении заданного числа оборотов (нужного расстояния), происходило отключение двигателя и сброс крыльев. Корпус аппарата падал вертикально вниз в цель.
Аппарат имел малую дальность и мог двигаться только по прямой из пункта «А» в пункт «Б». Маршрут с большим количеством точек был невыполнимой задачей, как и возвращение аппарата на место старта.
Выявим технические противоречия (ТП), имеющиеся в описываемой системе, для единообразия в формулировках противоречий все рассматриваемы системы будем называть БПЛА:
ТП1. При повышении степени стабилизации БПЛА по крену, путём введения стабилизирующих элементов на крыльях, недопустимо повышается вес аппарата.
ТП2. При повышении степени стабилизации БПЛА по крену, путём введения стабилизирующих элементов на крыльях, недопустимо повышается сложность конструкции.
ТП3. При повышении степени стабилизации по курсу недопустимо уменьшается расстояние до цели.
ТП4. При повышении сложности маршрута недопустимо повышается сложность конструкции.
Противоречие ТП4 было разрешено использованием приёмов вынесения, непрерывности полезного действия, «посредника», путём замены инерциального автопилота на систему радиоуправления. Этап ТРИЗ-эволюции представлен на рисунке 4.

Рисунок 4 – Первый этап эволюции.
2. Новая веха : появление радиоуправляемых летательных аппаратов .
В 1930-х годах армия США получила предложения поставлять радиоуправляемые беспилотные самолёты для различных нужд. Среди компаний, сделавших предложение, была Radioplane Company. Основана она Дени Реджинальдом, бывшим пилотом британской королевской авиации, который эмигрировал в США и стал актёром, а позже основал магазин и компанию по производству радио моделей самолётов .
Radioplane Company предложила армии США линейку радиоуправляемых моделей самолётов, среди которых присутствовала модель Radioplane OQ-2 (рис. 5). Это первый дистанционно-пилотируемый летательный аппарат (ДПЛА), поступивший в массовое производство. В общем было произведено 15000 моделей. Эксплуатация проводилась вплоть до 1948 года .
Radioplane OQ-2 представлял собой самолёт-мишень для обучения зенитных расчётов. Длина – 2,65 м. Размах – 3,73 м. Взлётный вес – 47 кг. Максимальная скорость – 137 км/ч. Максимальное время полёта – 1 час.

Рисунок 5 – Внешний вид Radioplane OQ-2
Запуск происходил с катапульты, а управлялась беспилотная радио модель оператором с земли, который мог имитировать различный ситуации (например, заход истребителя для атаки). Если аппарат оставался цел после полёта, посадка происходила с помощью выбрасываемого парашюта и неубираемого шасси (было не у всех моделей), которое смягчало удар о землю. Блок-схема системы управления представления на рисунке 6.

Рисунок 6 – Блок-схема радиоуправления
Радиоуправление позволило беспилотникам следовать по сложным маршрутам и выполнять сложные манёвры в воздухе, превосходя в этом «Жука» Кеттеринга и «Крылатую торпеду» Сперри. Аппараты получили возможность возвращаться на стартовую позицию, что увеличило количество их использования. Малогабаритная конструкция Radioplane OQ-2 и простота позволили развивать ему большие скорости и покрывать большее расстояние. Однако появилась проблема с малым потолком использования в 2438 м.
Аппаратура того времени позволяла эффективно использовать Radioplane OQ-2 только в поле видимости оператора. Именно так оператор с земли мог производить управление беспилотником. Если аппарат вылетал из радиуса видимости, то его можно было контролировать только радаром, что не обеспечивало эффективного наблюдения и снижало точность позиционирования.
При рассмотрении Radioplane OQ-2 можно выявить следующие противоречия:
ТП5. При увеличении дальности, путём увеличения пунктов управления по маршруту движения радиоуправляемого аппарата, недопустимо увеличивается объём наземной аппаратуры управления.
ТП6. При увеличении дальности, путём увеличения пунктов управления по маршруту движения радиоуправляемого аппарата, недопустимо увеличивается количество персонала.
ТП7. При увеличении дальности, путём увеличения объёма топливного бака, недопустимо увеличивается вес.
Второй этап эволюции показан на рисунке 7.
Противоречие ТП7 было разрешено использованием приёмов вынесения, непрерывности полезного действия, «посредника».

Рисунок 7 – Второй этап эволюции
3. Разработки второй мировой войны .
Фау-1 – самолёт-снаряд, прообраз современных крылатый ракет, состоял на вооружении армии Германии в середине Второй мировой войны (рис. 8). Эта ракета создана в рамках проекта «Оружие возмездия». Проект беспилотного аппарата разработан немецкими конструкторами Робертом Луссером и Фритцем Госслау. Разработка производилась в период 1942-1944 гг .
Фау-1 была построена по самолётной схеме, в задней части корпуса над рулём курса крепился реактивный двигатель. В процессе разработки проекта появилась необходимость ввести стабилизаторы и гироскоп для стабилизации аппарата во время полёта.
На земле перед запуском беспилотному аппарату задавали значения высоты и курса, а так же дальность полёта. Наведение выполнялось по магнитному компасу. После пуска аппарата (производился с катапульты, либо с самолёта-носителя – модифицированного бомбардировщика Heinkel He 111 H-22) он летел с помощью автопилота по заданному курсу и на заранее определённой высоте. Стабилизация по курсу и тангажу осуществлялась на базе показаний 3-степенного гироскопа: по тангажу суммировались с показаниями барометрического датчика высоты; по курсу – со значениями угловых скоростей от двух 2-степенных гироскопов, используемых для уменьшения колебаний снаряда. Управление по крену отсутствовало, так как Фау-1 была достаточно устойчива вокруг продольной оси .

Рисунок 8 – Внешний вид Фау-1
Автопилот был пневматическим устройством, работающим на сжатом воздухе. Золотники пневматических машинок рулей курса и высоты приводились в действие воздушным давлением, в зависимости от показаний гироскопов. Сами гироскопы раскручивались также сжатым воздухом. Расстояние полёта задавалось на специальный механический счётчик, а прикреплённый на нос снаряда анемометр постепенно сводил значение к нулю. По достижении нулевого значения происходило разблокирование ударных взрывателей и отключение двигателя. Примерна блок-схема показана на рисунке 9.
Длина – 7.75 м. Размах крыльев – 5,3 (5,7) м. Максимальная скорость – 656 км/ч (по мере расходования топлива скорость доходила до 800 км/ч). Дальность доходила до 280 км.
Фау-1 могла летать только по прямой (как «Жук» Кеттеринга), однако покрывала большее расстояние и развивала гораздо большую скорость.

Рисунок 9 – Блок-схема системы управления.
После рассмотрения Фау-1 были выделены следующие технические противоречия:
ТП8. При упрощении процесса старта, путём отказа от катапульты, недопустимо увеличивается сложность конструкции.
ТП9. При увеличении сложности маршрута недопустимо увеличивается сложность оборудования.
ТП10. При увеличении сложности маршрута недопустимо увеличивается вес аппарата.
На основе вышеописанных противоречий выделен второй этап ТРИЗ-эволюции беспилотных летательных аппаратов (рис. 10).
Противоречия ТП8 и ТП9 были разрешены с помощью приёмов вынесения, непрерывности полезного действия, «посредника», путём замены самолётной схемы на вертолётную.

Рисунок 10 – Третий этап эволюции.
4. Противолодочный вертолёт .
Проект американского беспилотного летательного аппарата, а если точнее бдеспилотного вертолёта. Gyrodyne QH-50 DASH – первый в мире беспилотный вертолёт принятый на вооружение (рис. 11). Первый его полёт состоялся в 1959 году, и вплоть до 1969, когда ВМС США отказались от проекта, было произведено 700 аппаратов различных модификация. Изначально проектировались как штатное противолодочное вооружение ракетных крейсеров .

Рисунок 11 – Внешний вид Gyrodyne QH-50 DASH
Вертолёт был в длину 3,9 м, в высоту 3 м.. Вес неснаряжённого и снаряжённого соответственно 537 кг. и 991кг. Максимальный взлётный вес 1046 кг. Максимальная скорость 148 км/ч. и дальность 132 км. Практический потолок 4939 м. На борту нёс 33,6 галлонов топлива .
В отличие от предыдущих систем, аппарату не требовалась взлётная полоса или оборудование (например, катапульта), а требовалась небольшая ровная поверхность.
Беспилотный вертолёт разрабатывался для старта с палубы корабля. Перед запуском к нему подвешивали торпеды.
Контроль управления вёлся с пульта оператора (блок-схема системы управления представлена на рис. 12). На пульт также приходили данные о состоянии аппарата, сигналы оружейной системы. В дальнейшем было предложено ввести два пульта управления. По требованию, один пульт должен был находиться на палубе, а другой в командном пункте.
Так как торпеды весили много, пришлось отказаться от телеаппаратуры. Поэтому запускали сразу два вертолёта: один с аппаратом обнаружения и целеуказания; второй с вооружением.
Проект Gyrodyne QH-50 DASH был отменён из-за несовершенства системы управления и конструктивных дефектов, почти половина аппаратов разбились. Во время полёта у беспилотного вертолёта могло произойти самопроизвольное отключение аппаратуры управления. Также сказалось начало войны во Вьетнаме. Но использование беспилотного вертолёта вплоть до 2006 года как учебное пособие, объект экспериментов и т.д.

Рисунок 12 – Блок-схема системы управления.
Выделим противоречия беспилотного вертолёта Gyrodyne QH-50 DASH:
ТП11. При уменьшении габаритов беспилотного аппарата недопустимо уменьшается показатель полезной нагрузки.
ТП12. При уменьшении габаритов беспилотного аппарата недопустимо уменьшается дальность полёта.
Противоречия ТП10 и ТП11 были разрешены с помощью приёмов вынесения, объединения, универсальности, замены механической схемы, путём создания доступных контроллеров полёта для авиамоделистов.
По этим противоречиям составим этап ТРИЗ-эволюции (рис. 13).

Рисунок 13 – Четвёртый этап эволюции.
5. « Беспилотники » в массы . Полётные контроллеры для моделирования .
В наше время беспилотные летательные аппараты перестали быть военными «игрушками». В начале XXI века всё больше и больше различных БПЛА находят применение в гражданских сферах: аэросъёмка, доставка грузов, отдых и досуг, образование и др. Появилось множество схем конструкций (мультикоптеры, самолётного типа и др.). Теперь их можно спокойно купить в магазинах или даже сделать самому при покупке определённых комплектующих. О них и пойдёт речь далее.
Полётный контроллер – это основная плата управления, обеспечивающая функционирование беспилотного летательного аппарата.
Одним из первых популярных полётных контроллеров XXI века был MultiWii (рис. 14). Это открытый проект полётного контроллера на основе Arduino (аппаратной вычислительной платформе, основными компонентами которой являются простая плата ввода/вывода и среда разработки на языке Processing/Wirin (Си подобный)). Используется как элемент системы управления самодельных беспилотных аппаратов (в частности для мультикоптеров). Название MultiWii исторически сложилось потому, что в первых версиях были задействованы гироскопы из контроллера к игровой консоли Nintendo Wii.

Рисунок 14 – Внешний вид платы MultiWii
В данный момент платформа поддерживает большое количество сенсоров. Изначально нужно было докупать гироскопы из контроллера Wii Motion Plus и акселерометр из контроллера Wii Nunchuk, однако сейчас этого делать не нужно.
Так как основой проекта служит Arduino, то подключаемые модули (GPS, радио передатчик и т.д.) совместимо с проектом полётного контроллера ArduPilot (подробнее о нём поговорим ниже). По своей сути это плата с контактами, а не готовая система управления, к которой радиолюбитель может присоединять различные модули (в соответствии с нужными целями). Есть возможность настроить управление по радио пульту (с помощью приемника/передатчика радиосвязи) либо простые функции автопилота, такие как движение по точкам (необходим модуль GPS) и удержание курса (магнитометр). Естественно всё это возможно только при правильной настройке контроллера.
Изначально на плате был 8-битный микроконтроллер ATMega328 (тактовая частота до 20MHz, FLASH-память 32кб, SRAM-память 2кб), либо ATMega2560 (тактовая частота 16MHz, FLASH-память 256кб, SRAM-память 8кб). Но, т. к. проект является открытым, появились любительские версии с 32-битным STM32. Так же присутствуют встроенные датчики MPU6050 (3-осевой гироскоп и 3-осевой акселерометр), BMP085 (барометр) и HMC5883L (электронный магнитный компас). Информация представлена в общем виде и может отличаться для различных версий плат.
На рисунке 15 показана блок-схема системы управления.
Предполагаемый алгоритм управления:
1) Необходимо подключить все необходимые для задачи пользователя модули, предварительно записав программу в микроконтроллер (официальную или самодельную).
3) В зависимости от конструкции беспилотного аппарата, следует произвести запуск.
Полётные контроллеры в основном предназначались для радиоуправления. Хоть они и поддерживали некоторые функции автопилота, оператору приходилось контролировать полёт. Например, двигаясь по точкам маршрута, летающий аппарата может врезаться в возникшее препятствие, если не будет принято своевременных мер. Это относится и к остальным моделям полётных контроллеров, описанных ниже.

Рисунок 15 – Блок-схема системы управления.
ТП13. При повышении гибкости настройки управления контроллера недопустимо повышается сложность кода.
ТП14. При повышении гибкости настройки управления контроллера недопустимо повышается количество часов, требуемых на это.
Противоречия ТП13 и ТП14 были разрешены с помощью приёмов вынесения, объединения, универсальности, замены механической схемы.
Этап эволюции показан на рисунке 16.

Рисунок 16 – Пятый этап эволюции.
6. Новые аналоги .
Контроллер CopterControl3D (CC3D) создан в рамках открытого проекта Open Pilot,начатого в 2009 году (рис. 17). Как и MultiWii является небольшой и относительно дешевой программируемой платой, но в отличие от неё разрабатывался специально для квадрокоптеров. Так же получил своё программное обеспечение OpenPilot GCS для настройки. Примерно 90% квадрокоптеров используемых для управления First Person Viev (FPV, вид от первого лица – управление осуществляется не только по радио каналу, но и по дополнительному каналу принимается на экран видео в реальном времени) собираются любителями именно на этом контроллере.

Рисунок 17 – Внешний вид платы CC3D
На плате присутствует 32-битный микроконтроллер STM32F103 72MHz с FLASH-памятью 128кб и чип MPU6000 (совмещает 3-осевой гироскоп и 3-осевой акселерометр).
Информация представлена в общем виде и может отличаться для различных версий плат.
Блок-схема системы управления показана на рисунке 18 (отличия только в интерфейсах подключения устройств).

Рисунок 18 – Блок-схема системы управления
В системе выявлены следующие противоречия:
ТП15. При повышении гибкости управления контроллера, путём добавления функций автопилота, недопустимо повышается сложность кода.
ТП16. При повышении универсальности использования контроллера недопустимо повышается сложность кода.
Противоречия ТП15 и ТП16 были разрешены с помощью приёмов вынесения, универсальности, самообслуживания, «посредника».
Этап эволюции представлен на рисунке 19.

Рисунок 19 – Шестой этап эволюции
7. Решение от Arduino.
Полётный контроллер ArduPilot Mega (рис. 20), разработанный компанией Arduino. Главным отличием от предыдущих является поддержка не только летающих беспилотных аппаратов, но наземных и лодочных систем. Так же помимо радиоуправляемого дистанционного пилотирования – автоматическое управление по заранее созданному маршруту, т.е. полет по точкам, а так же обладает возможностью двухсторонней передачей телеметрических данных с борта на наземную станцию (телефон, планшет, ноутбук и т.д.) и ведение журнала во встроенную память.

Рисунок 20 – Внешний вид платы
Контроллер поддерживает программирование, как и прочие продукты Arduino, язык программирования Arduino (является стандартным C++ с некоторыми особенностями). При грамотной настройке позволяет превратить любой аппарат в автономное средство и эффективно использовать его не только в развлекательных целях, но и для выполнения профессиональных проектов. По сравнению с вышеописанными платами более стабильно ведёт себя во время полёта, может неплохо выполнять некоторые фигуры полёта.
Контроллер поддерживает авиасимулятор через ПО Mission Planner, который позволят настроить управление, проложить маршрут и т.д.
На плате установлен микроконтроллеры ATMega2560 и ATMega32U2 (8-битный, тактовая частота 16 MHz, FLASH-память 32кб, SRAM-память 1 кб), датчики MPU6000 и MS5611 (барометр).
Блок-схема системы управления показана на рисунке 21.

Рисунок 21 – Блок-схема системы управления.
В рассмотренной системе были выявлены следующее противоречие:
ТП17. При повышении гибкости управления контроллера недопустимо уменьшается универсальность использования контроллера.
ТП18. При повышении качества платы недопустимо повышается цена.
ТП19. При повышении гибкости управления контроллера недопустимо повышается сложность схемы подключения периферии.
Противоречия ТП17 и ТП18 были разрешены с помощью приёмов объединения, дешёвой замены, универсальности, путём создания универсального полётного контроллера.
На рисунке 22 показан этап эволюции.

Рисунок 22 – Седьмой этап эволюции.
8. Новое поколение .
Pixhawk – полетный контроллер нового поколения (рис. 23), дальнейшая разработка проекта PX4 и программного кода Ardupilot от 3DRobotics. В контроллере присутствует операционная система реального времени NuttX.
Контроллер поддерживает большое количество систем:
наземные, воздушные, наводные. Поддерживает различные модули и стандарты для их связи. Из-за своей универсальности и стал популярным. Поддерживает использование ПО Mission Planner как ArduPilot.

Рисунок 23 – Внешний вид контроллера Pixhawk
На плате установлен 32-битный микропроцессор STM32F427 Cortex M4 (168MHz, FLASH-память 2 Мб, RAM- память 256кб) и 32-битный сопроцессор STM32F103. Так же присутствуют датчики: ST Micro L3GD 20 – 3-осевой гироскоп, ST Micro LSM303D – 3-осевой акселерометр/магнитометр, MPU6000 - 3-осевой акселерометр/гироскоп, MEAS MS5611 – барометр.
Блок-схема системы управления показана на рисунке 24.

Рисунок 24 – Блок-схема системы управления.
Выявим противоречия описанной системы:
ТП20. При повышении гибкости управления аппарата недопустимо повышается сложность аппаратуры управления.
Противоречия ТП20 были разрешены с помощью приёмов объединения, универсальности, путём создания многофункционального БПЛА с открытым кодом для любительских разработок.
Этап эволюции представлен на рисунке 25.

Рисунок 25 – Восьмой этап эволюции.
9. Готовое решение .
В 2010 году французская фирма Parrot выпустила на рынок свой беспилотный летательный аппарат AR.Drone. Через пару лет была выпущена обновлённая версия Parrot AR.Drone 2.0 (рис. 29). Проект квадрокоптера был полностью открыт для идей пользователей, что помогло ему стать хитом.
У Parrot AR.Drone 2.0 имеются четыре мотора мощностью 14,5 Вт. Максимальная скорость – 18 км/ч. Масса дополнительной полезной нагрузки – 150 г. Процессор ARM Cortex A8 с частотой 1 ГГц. с 800 Гц. DSP TMS320DMC64x для обработки видео сигналов. RAM DDR2 1Гбит. Две камеры: основная для съёмки и режима FPV с разрешением 720p; дополнительная камера с разрешением 240p для измерения горизонтальной скорости, расположена снизу.Wi-Fi точка для подключения устройства управления (смартфон или планшет с ОС Android или iOS) .

Рисунок 29 – Внешний вид Parrot AR.Drone 2.0
Открытость проекта позволяет к готовому аппарату подключать дополнительные компоненты. Это была одна из привлекательных черт описываемого квадрокоптера. Также пользователи могли программировать его полётный контроллер, либо создавать различные приложения для управления на языках C, Java и Objectiv-C.
Примерная блок-схема управления представлена на рисунке 30.
Одна из главных проблем всех беспилотных летающих аппаратов заключается в том, что если во время режима автопилота перед ними возникнет препятствие (будь то стена, дерево, другой летающий аппарат или даже человек) столкновения не избежать. Максимум на что можно рассчитывать, что БПЛА попытается остановиться или оператор вовремя вмешается в процесс. Однако, если прогнозы развития верны и в ближайшее время нас ожидает дальнейшее развитие рынка беспилотных летательных аппаратов, эта проблема будет всё больше набирать актуальность.

Рисунок 30 – Блок-схема системы управления.
Выявленные противоречия:
ТП21. При добавлении дополнительной аппаратуры, повышающей функционал автопилота, недопустимо повышается вес аппарата.
10. Дальнейшее развитие .
Дальнейшее развитие беспилотных систем, в том числе БПЛА, заключается во внедрении в систему управления искусственного интеллекта. Интеллектуальная система управления позволит ещё больше развить функции автопилота, автоматизировать беспилотные аппараты. При этом действия оператора сводятся только к подготовке аппарату к началу полёта и непосредственно к самому запуску.
Но возникает техническое противоречие ТП21. Это противоречие разрешается принципами объединения, универсальности, непрерывности полезного действия, «посредника».
Интеллектуальную систему управления можно реализовать на микропроцессорном компьютере (например, Raspberry Pi) с несколькими датчиками (2 видео камеры и лидар). Такая система при движении по заданному маршруту сможет определить появившееся препятствие, которым может быть человек, другой БПЛА или дерево, стена, которые не заметил оператор при составлении маршрута. Данная система будет распознавать объекты методом компьютерного зрения и определять вектор движения этих объектов. После определения вектора движения, система сравнит его с вектором БПЛА и построит маршрут уклонения с минимальным уходом с маршрута. Такая схема несильно повлияет свои весом на характеристики беспилотного летательного аппарата, но значительно повысит степень его «выживаемости».
Литература и примечания :
Куда полетит беспилотник без пилота – День за днем [электронный ресурс] // LIVEJOURNAL.COM: Живой журнал. – Электрон. данные. URL: http://novser.livejournal.com/9293
99.html OQ-2 [электронный ресурс] // AVIA.PRO: Новости авиации. – Электрон. данные. URL: http://avia.pro/blog/oq-2
(дата обращения 14.11.2016 г.). – Заглавие с экрана.
Фау-1 [электронный ресурс] // ANAGA.RU: Информационный портал «Столичный комитет». 2008 г. – Электрон. данные. URL: http://anaga.ru/v-1.htm (дата обращения
17.12.2016 г.). – Заглавие с экрана. Gyrodyne Helicopter Co. Mfg of QH-50 series of VTOL
UAVs. [электронный ресурс] // GYRODYNEHELICOPT ERS.COM: Информационный сайт. – Электрон. данные. URL: http://www.gyrodynehelicopters.com/dash_weapon_system.htm
(дата обращения 14.11.2016 г.). – Заглавие с экрана.
AR.Drone 2.0: обзор возможностей и дополнений [электронный ресурс] // XAKER.RU: Электронный журнал. – Электрон. данные. URL:
БПЛА – беспилотный летательный аппарат. Еще их называют дроны (от англ. трутень) или просто беспилотники. На самом деле никаких беспилотников не существует. Любой БПЛА имеет своего оператора-пилота, а некоторые дроны имеют по два-три оператора. В данном случае, термин «беспилотный» означает что летчик не находится на борту летательного аппарата (ЛА). Но управляет разведывательным или ударным беспилотником все-таки человек.
Применение БПЛА в военных конфликтах, с участием американской армии, в последние годы, многократно увеличилось. В связи с этим, конгрессом США в 2013 году планировалось ввести медаль «За особые боевые заслуги», которую полагали вручать операторам беспилотников и спецам боевых киберподразделений принимавшим участие в военных конфликтах. Но справедливое негодование настоящих ветеранов, участников настоящих боев, было так велико, что медаль без особой помпы тихо отменили. Это говорит, во-первых, о многократно возросшем участии операторов в боевых действиях, и, во-вторых, о назревающем конфликте в системе БПЛА – оператор.
Так кто же такой оператор-пилот дрона? Военный, принимающий ответственные решения о применении оружия? Или просто геймер виртуально управляющий дорогой игрушкой на расстоянии? Задача беспилотника не подвергать опасности человека сидящего в кабине. Действительно, физической опасности для оператора, находящегося за много миль от места боевых действий, не существует. Однако, как выяснили американские психологи и медики, оператор БПЛА, проводивший боевые операции с применением оружия, подвержен серьезным психологическим нагрузкам. Он даже подвержен посттравматическим синдромам, подобно бойцу, принимавшему непосредственное участие в боевых операциях. Как бы ни был автоматизирован дрон-беспилотник, ответственность за его действия, за применение оружия несет человек. Опыт эксплуатации оперативно-тактических беспилотных авиационных комплексов (БАК), показал, что наиболее эффективна команда из трех человек для управления и принятия решения.

Первый это сам пилот, управляющий БПЛА, второй член команды - оператор боевых систем. В его обязанности входит обнаружение, идентификация цели, и принятие решения о применении оружия. И третий из состава-оператор интеллектуальных систем, имеющий опыт управления БПЛА и владеющий системами интеллектуальной поддержки в помощь летчику, обладающий отменной реакцией в принятии решения. Эта команда, со своими рабочими местами объединена в локальную сеть, и находятся в одном операторском помещении.

Помещение мобильно и оборудовано всеми необходимыми многофункциональными органами управления, многофункциональными мониторами, и ручными органами управления. К ручным органам управления относятся кистевые самолетные ручки и флайстики на манер игровых джойстиков. Несмотря на огромное количество современного оборудования, на большое количество поступающей и обрабатываемой информации этого явно недостаточно. Это хорошо понимают пилоты, которые знают разницу между авиатренажером и реальным полетом. Как бы ни был совершенен авиасимулятор или тренажер, он имеет один существенный недостаток, так называемый «сенсорный голод». Это, прежде всего отсутствие перегрузок, которые чувствует в полете пилот «пятой точкой».

Неуловимое изменение в пространстве самолета сразу становится понятно опытному летчику как раз этой самой пресловутой «пятой точкой», и это не анекдот, автор этих строк испытал на себе это ощущение. Небольшая вертикальная или боковая нагрузка, говорит о полете больше чем все приборы вместе взятые. Так вот, оператор БПЛА как раз вот этих ощущений и лишен. Если добавить сюда отсутствие звука двигателя, и невозможность бросить мгновенный взгляд влево-вправо, вверх-назад, становится понятным термин «сенсорное голодание». Работы над обратной связью «БПЛА-пилот» сейчас ведутся полным ходом. Например, дрожание картинки на экране, и вибрация флайстика, может подсказать оператору о попадании ЛА в зону турбулентности, это позволит ему оперативнее отреагировать не неблагополучную ситуацию в полете.

Первоначально операторов набирали среди бывших или действующих пилотов. Но со временем стало понятно, что по скорости реакции, без ощущений «пятой точки», стало ясно, что профессионалы значительно уступают простым геймерам, имеющим опыт обращения с авиасимуляторами на компьютерах или игровых консолях, таких как Playstation или ХBoх. Операторы, обучающиеся пилотированию БПЛА, что называется «с нуля», быстрее осваивали сложную аппаратуру и управление ЛА, в отличие от летчиков, которые делали больше ошибок и медленнее обучались.

Но в связи с этим встает проблема уже не технического характера, а морально-этического. Профессиональный военный летчик много лет не только осваивает сложную авиационную технику, он так же готовится принимать ответственные решения в экстремальных боевых условиях. Четко осознает все меру ответственности за применение боевого оружия, за управление очень дорогостоящим ЛА. Он сам находится в гуще событий, подвергается опасности, для него это не виртуальная реальность. Оператор из гражданских, привлеченных на службу геймеров, не всегда осознает грань между виртуальным и реальным пространством. Для него сохраняется игровой момент в управлении многомиллионным беспилотником. Сейчас существует десять степеней автоматизации в системе «оператор-БПЛА». От полного управления и принятия всех решений оператором человеком, до полной автономности дрона, где человек просто наблюдатель, не принимающий никаких решений. Если в первом варианте всю моральную и правовую ответственность за отдачу команды «огонь» несет полностью человек, то во втором варианте автоматика, робот. И тогда случаи сбоя или неисправности, могут привести к фатальным последствиям. Сейчас в лабораториях США ведутся исследования и разработки голосового интерфейса для общения оператора с роботом-дроном. И для принятия ответственного решения на применение оружия, они могут выработать совместное решение, предварительно «обсудив» ситуацию.

Сейчас сохраняется тенденция большей ответственности оператора человека за принимаемые решения. Даже посадку тяжелых многофункциональных БПЛА осуществляет оператор. Дроны склонны к более крутой глиссаде на посадке, к большим перегрузкам и более жесткому касанию полосы, что зачастую приводит к выводу из строя взлетно-посадочных устройств, или попросту-шасси. И сейчас БПЛА в основном сажаются операторами-пилотами, ведь стоимость тяжелого дрона-десятки миллионов долларов.
К 2030 году планируется сконструировать полностью автономного робота-дрона, принимающего все решения автономно, вплоть до выбора цели, и нанесения боевого удара. А пока, ведущее место в управлении БПЛА занимает все-таки человек, пилот, оператор, осознающий всю меру ответственности за чьи-то жизни.
Валерий Смирнов специально для
Федеральное агентство по образованию Российской Федерации
Государственное образовательное учреждение высшего профессионального образования
«Южно-Уральский государственный университет»
Факультет Аэрокосмический
Кафедра Летательные аппараты и управление
по истории аэрокосмической техники
Описание систем управления беспилотными летательными аппаратами
Челябинск 2009
Введение
Сам по себе БЛА - лишь часть сложного многофункционального комплекса. Как правило, основная задача, возлагаемая на комплексы БЛА, – проведение разведки труднодоступных районов, в которых получение информации обычными средствами, включая авиаразведку, затруднено или же подвергает опасности здоровье и даже жизнь людей. Помимо военного использования применение комплексов БЛА открывает возможность оперативного и недорогого способа обследования труднодоступных участков местности, периодического наблюдения заданных районов, цифрового фотографирования для использования в геодезических работах и в случаях чрезвычайных ситуаций. Полученная бортовыми средствами мониторинга информация должна в режиме реального времени передаваться на пункт управления для обработки и принятия адекватных решений. В настоящее время наибольшее распространение получили тактические комплексы микро и мини-БЛА. В связи с большей взлетной массой мини-БЛА их полезная нагрузка по своему функциональному составу наиболее полно представляет состав бортового оборудования, отвечающего современным требованиям к многофункциональному разведывательному БЛА. Поэтому далее рассмотрим состав полезной нагрузки мини-БЛА.
История
В 1898 г. Никола Тесла разработал и продемонстрировал миниатюрное радиоуправляемое судно. В 1910 г., вдохновлённый успехами братьев Райт, молодой американский военный инженер из Огайо Чарльз Кеттеринг предложил использовать летательные аппараты без человека. По его замыслу управляемое часовым механизмом устройство в заданном месте должно было сбрасывать крылья и падать как бомба на врага. Получив финансирование армии США, он построил, и с переменным успехом испытал несколько устройств, получивших названия The Kattering Aerial Torpedo, Kettering Bug (или просто Bug), но в боевых действиях они так и не применялись. В 1933 г. в Великобритании разработан первый БПЛА многократного использования Queen Bee. Были использованы три отреставрированных биплана Fairy Queen, дистанционно управляемые с судна по радио. Два из них потерпели аварию, а третий совершил успешный полёт, сделав Великобританию первой страной, извлёкшей пользу из БПЛА. Эта радиоуправляемая беспилотная мишень под названием DH82A Tiger Moth использовалась на королевском Военно-морском флоте с 1934 по 1943 г. Армия и ВМФ США с 1940 года использовали ДПЛА Radioplane OQ-2 в качестве самолёта-мишени. На несколько десятков лет опередили своё время исследования немецких учёных, давших миру на протяжении 40-х годов реактивный двигатель и крылатую ракету. Практически до конца восьмидесятых, каждая удачная конструкция БПЛА «от крылатой ракеты» представляла собой разработку на базе «Фау-1», а «от самолёта» - «Фокке-Вульф» Fw 189. Ракета Фау-1 была первым применявшимся в реальных боевых действиях беспилотным летательным аппаратом. В течение второй мировой войны немецкие учёные вели разработки нескольких радиоуправляемых типов оружия, включая управляемые бомбы Henschel Hs 293 и Fritz X, ракету Enzian и радиоуправляемый самолёт, заполненный взрывчатым веществом. Несмотря на незавершённость проектов, Fritz X и Hs 293 использовались на Средиземном море против бронированных военных кораблей. Менее сложным и созданным скорее с политическими, чем с военными целями самолёт V1 Buzz Bomb с реактивным пульсирующим двигателем, который мог запускаться как с земли, так и с воздуха. В СССР в 1930-1940 гг. авиаконструктором Никитиным разрабатывался торпедоносец-планер специального назначения (ПСН-1 и ПСН-2) типа «летающее крыло» в двух вариантах: пилотируемый тренировочно-пристрелочный и беспилотный с полной автоматикой. К началу 1940 г. был представлен проект беспилотной летающей торпеды с дальностью полёта от 100 км и выше (при скорости полёта 700 км/ч). Однако этим разработкам не было суждено воплотится в реальные конструкции. В 1941 году были удачные применения тяжёлых бомбардировщиков ТБ-3 в качестве БПЛА для уничтожения мостов. Во время второй мировой войны ВМС США для нанесения ударов по базам германских подводных лодок пытались использовать дистанционно пилотируемые системы палубного базирования на базе самолёта B-17. После второй мировой войны в США продолжились разработки некоторых видов БПЛА. Во время войны в Корее для уничтожения мостов успешно применялась радиоуправляемая бомба Tarzon. 23 сентября 1957 г. КБ Туполева получил госзаказ на разработку мобильной ядерной сверхзвуковой крылатой ракеты среднего радиуса действия. Первый взлёт модели Ту-121 был осуществлён 25 августа 1960 г., но программа была закрыта в пользу Баллистических ракет КБ Королёва. Созданная же конструкция нашла применение в качестве мишени, а также при создании беспилотных самолётов разведчиков Ту-123 «Ястреб», Ту-143 «Рейс» и Ту-141 «Стриж», стоявших на вооружении ВВС СССР с 1964 по 1979 г. Ту-143 «Рейс» на протяжении 70-х годов поставлялся в африканские и ближневосточные страны, в том числе и в Ирак. Ту-141 «Стриж» состоит на вооружении ВВС Украины и поныне. Комплексы «Рейс» с БРЛА Ту-143 эксплуатируются до настоящего времени, поставлялись в Чехословакию (1984 г.), Румынию, Ирак и Сирию (1982 г.), использовались в боевых действиях во время Ливанской войны. В Чехословакии в 1984 г. были сформированы две эскадрильи, одна из которых в настоящее время находиться в Чехии, другая - в Словакии. В начале 1960-х годов дистанционно-пилотируемые летательные аппараты использовались США для слежения за ракетными разработками в Советском Союзе и на Кубе. После того, как были сбиты RB-47 и два U-2, для выполнения разведывательных работ была начата разработка высотного беспилотного разведчика Red Wadon (модель 136). БПЛА имел высоко расположенные крылья и малую радиолокационную и инфракрасную заметность. Во время войны во Вьетнаме с ростом потерь американской авиации от ракет вьетнамских ЗРК возросло использование БПЛА. В основном они использовались для ведения фоторазведки, иногда для целей РЭБ. В частности, для ведения радиотехнической разведки применялись БПЛА 147E. Несмотря на то что, в конечном счёте, он был сбит, беспилотник передавал на наземный пункт характеристики вьетнамского ЗРК C75 в течение всего своего полёта. Ценность этой информации была соизмерима с полной стоимостью программы разработки беспилотного летательного аппарата. Она также позволила сохранить жизнь многим американским лётчикам, а также самолёты в течение последующих 15 лет, вплоть до 1973 г. В ходе войны американские БПЛА совершили почти 3500 полётов, причём потери составили около четырёх процентов. Аппараты применялись для ведения фоторазведки, ретрансляции сигнала, разведки радиоэлектронных средств, РЭБ и в качестве ложных целей для усложнения воздушной обстановки. Но полная программа БПЛА была окутана тайной настолько, что её успех, который должен был стимулировать развитие БПЛА после конца военных действий, в значительной степени остался незамеченным. Беспилотные летательные аппараты применялись Израилем во время арабо-израильского конфликта в 1973 г. Они использовались для наблюдений и разведки, а также в качестве ложных целей. В 1982 г. БПЛА использовались во время боевых действий в долине Бекаа в Ливане. Израильский БПЛА AI Scout и малоразмерные дистанционно-пилотируемые летательные аппараты Mastiff провели разведку и наблюдение сирийских аэродромов, позиций ЗРК и передвижений войск. По информации, получаемой с помощью БПЛА, отвлекающая группа израильской авиации перед ударом главных сил вызвала включение радиолокационных станций сирийских ЗРК, по которым был нанесён удар с помощью самонаводящихся противорадиолокационных ракет, а те средства, которые не были уничтожены, были подавлены помехами. Успех израильской авиации был впечатляющим - Сирия потеряла 18 батарей ЗРК. СССР ещё в 70-е-80-е годы был лидером по производству БПЛА, только Ту-143 было выпущено около 950 штук. Дистанционно-пилотируемые летательные аппараты и автономные БПЛА использовались обеими сторонами в течение войны в Персидском заливе 1991 г., прежде всего как платформы наблюдения и разведки. США, Англия, и Франция развернули и эффективно использовали системы типа Pioneer, Pointer, Exdrone, Midge, Alpilles Mart, CL-89. Ирак использовал Al Yamamah, Makareb-1000, Sahreb-1 и Sahreb-2. Во время операции «Буря в пустыне» БПЛА тактической разведки коалиции совершили более 530 вылетов, налёт составил около 1700 часов. При этом 28 аппаратов были повреждены, включая 12, которые были сбиты. Из 40 БПЛА Pioneer, используемых США, 60 процентов были повреждены, но 75 процентов оказались ремонтопригодными. Из всех потерянных БПЛА только 2 относились к боевым потерям. Низкий коэффициент потерь обусловлен вероятнее всего небольшими размерами БПЛА, в силу чего иракская армия сочла что они не представляют большой угрозы. БПЛА также использовались и в операциях по поддержанию мира силами ООН в бывшей Югославии. В 1992 г. Организация Объединённых Наций санкционировала использование военно-воздушных сил НАТО, чтобы обеспечить прикрытие Боснии с воздуха, поддерживать наземные войска, размещённые по всей стране. Для выполнения этой задачи требовалось ведение круглосуточной разведки.
В августе 2008 года ВВС США завершили перевооружение беспилотными летательными аппаратами MQ-9 Reaper первой боевой авиачасти - 174-го истребительного авиакрыла Национальной гвардии.Перевооружение происходило в течение трёх лет. Ударные БПЛА показали высокую эффективность в Афганистане и Ираке. Основные преимущества перед заменёнными F-16: меньшая стоимость закупки и эксплуатации, большая продолжительность полёта, безопасность операторов.
Уникальное программное решение помогает заказчикам эффективно управлять даже большим количеством беспилотных летательных аппаратов (БЛА), или дронов.
Аэрофотосъемка, видеонаблюдение, обследование обширных территорий, экологический мониторинг - это далеко не полный перечень задач, которые становятся проще с использованием беспилотников. Чтобы раскрыть весь потенциал дронов, их операторы должны иметь в распоряжении удобный инструмент для контроля и управления БЛА.
КРОК предлагает заказчикам универсальную систему управления, которая поддерживает практически все доступные на гражданском рынке беспилотные системы и автопилоты: DJI, MavLink-совместимые, Yuneec, Mikrokopter, Microdrones.
Предлагаемые продукты
|
Планирование и выполнение полетов Программное обеспечение для управления беспилотниками и производства карт по данным аэрофотосъемки. Планирование оптимального маршрута на трехмерной карте с учетом препятствий, закрытых зон |
|
|
Система высотного наблюдения Привязной беспилотный летательный аппарат с подачей питания по проводу с наземной станции. Высота - до 100 м, продолжительность полёта - до 200 часов |
|
|
Управление группировками дронов Координация синхронных перемещений множества беспилотных летательных аппаратов для организации световых, пиротехнических шоу |
|
Функции решения
- Управление одним или несколькими БЛА, прием и запись телеметрии, уведомление оператора об опасных сближениях дронов с другими участниками воздушного движения
- Поддержка ОС Windows, MacOS, Linux, Android
- Одновременная работа нескольких операторов, гибкая настройка сценариев управления, разделение функций между участниками команды
- Интеграция с системами автоматического зависимого наблюдения-вещания (АЗН-В)
Особенности решения
Универсальная архитектура позволяет подключать дроны со своими протоколами управления и телеметрии, быстро и легко добавлять новые устройства без масштабных доработок ПО - прямо «из коробки» система знакома с устройствами от основных ведущих производителей робототехники. Решение поддерживает масштабируемость и модульность для поддержки новых протоколов управления и типов полезной нагрузки.
Разные сценарии позволяют работать с системой одному или нескольким операторам, управляющим одним или несколькими БЛА, разделять между операторами управление движением и полезной нагрузкой БЛА. Пользовательский интерфейс может быть стандартизирован для конкретного типа аппарата. Режим симуляции позволяет организовать обучение, тренировку операторов БЛА и проведение экзаменов.
Благодаря поддержке полноценной трехмерной картографии и алгоритмов планирования траекторий можно создавать маршруты с учетом рельефа, препятствий и запретных зон, трасс в воздушном пространстве РФ, отраженных на цифровой модели местности. Задания формируются с использованием типовых маневров: движение по прямой, круг, «змейка», «коробочка», облет периметра, аэрофотосъемка с заданными параметрами перекрытия и разрешения. При подготовке заданий операторы могут измерять расстояния и площади, оценивать зоны прямой радиовидимости, планировать выполнение различных действий на тех или иных сегментах маршрута: поворот камеры, съемка в точке интереса, сброс полезной нагрузки и т. д. В постоянном режиме обеспечивается контроль профиля высот по маршруту.
В зависимости от типа полезной нагрузки БЛА могут собирать большие объёмы фото- и видеоматериалов, данных радиационной, экологической разведки, прочую информацию об окружающей обстановке с привязкой к модели движения с координатами и ориентацией в пространстве. По желанию заказчика систему можно доработать для сбора информации от внешних систем и электронных чипов (местоположение личного состава, стационарной и подвижной техники, объекты из системы автоматического зависимого наблюдения-вещания). Получение оперативной информации и отображение целевых объектов на карте повышает скорость оценки сценариев развития и планирования заданий. Все данные телеметрии могут сохраняться для дальнейшего анализа и просмотра.
Архитектура построения навигационного комплекса беспилотных летательных аппаратов может быть различной, в зависимости от требований и выполняемой задачи, ниже рассмотрены основные из них.
Как показывает опыт разработки беспилотных летательных аппаратов, в контуре управления БЛА существуют два основных элемента. Первый - исполнительный, т.е. это сам планер с силовой установкой и рулевые механизмы. Второй - командный. Это тот элемент, который ставит задачу на полёт, принимает решение в случае необходимости изменить программу полёта, выполняет коррекцию движения летательного аппарата при его отклонениях от заданной траектории движения.
При построении комплекса управления БЛА командный элемент или его часть выносится за пределы аппарата и связывается с исполнительным элементом линией передачи.
Наибольшие трудности возникают при разработке системы управления (СУ). Это связано с тем, что БЛА должен выполнять задачи в условиях автономного полёта, следовательно, иметь полную функционально замкнутую СУ. Кроме того, малые размеры и масса БЛА приводят к увеличению количества и диапазона внешних воздействий на данные объекты по сравнению с существующими летательными аппаратами, и, следовательно, ужесточают требования к элементной базе СУ. В связи с этим СУ должна решать следующие задачи:
стабилизация параметров движения объекта применительно к внешним помехам различной природы;
анализ внешних данных бортовыми средствами и определение приоритетной цели в зависимости от поставленной перед БЛА задачи;
расчет оптимальной траектории движения с целью уменьшения времени движения и расхода ресурсов БЛА;
контроль правильности удержания траектории;
обеспечение отказоустойчивости объекта управления или компенсация изменений его характеристик бортовыми средствами;
выполнение вычислительных операций большого объема в реальном масштабе времени для реализации алгоритмов управления БЛА.
Следует подчеркнуть, что основной функцией, решаемой СУ, является управление движением центра масс (три канала управления) и угловыми движениями БЛА относительно центра масс (три канала управления). Если не нужно точно выдерживать движение летательного аппарата по заданной траектории, то управляют только его угловыми движениями. Управление угловыми движениями обеспечивает вполне определенное положение БЛА в пространстве по отношению к вектору скорости центра масс. Управление движением центра масс обеспечивает полёт по наилучшей (оптимальной) траектории, например, по кратчайшему пути за кратчайшее время.
Таким образом, управление полетом БЛА сводится к управлению параметрами его движения: угловыми координатами, угловыми скоростями и ускорениями, линейными координатами (дальностью, высотой, боковым перемещением) и т. д.
Существующие СУ подразделяют на автономные и неавтономные. Кроме того, в отдельную группу могут быть выделены комбинированные СУ. Особенностью автономных СУ является то, что сигналы управления движением вырабатываются аппаратурой, целиком расположенной на борту, причем эта аппаратура после запуска не получает никакой информации из пункта управления. Автономные СУ действуют по заранее определенной программе.
При использовании автономных систем существует два метода получения управляющих сигналов. Можно заранее перед стартом рассчитать, как должны изменяться во времени основные параметры движения БЛА (скорость, угол и т.д.), определяющие траекторию движения. Полученные функции времени вводятся в специальные устройства СУ в качестве заданных величин или программ. После старта в процессе полета БЛА соответствующими устройствами непрерывно изменяются текущие (действительные) значения указанных параметров. СУ осуществляет сравнение расчетных значений параметров с текущими значениями и при их неравенстве вырабатывает соответствующие сигналы управления. Если на БЛА установлена аппаратура, позволяющая вести непрерывное измерение её координат в пространстве, то автономное управление можно осуществить по-другому. Координаты, получаемые от аппаратуры, автоматически вводятся в бортовое вычислительное устройство, которое в соответствии с заранее заложенной программой вычисляет величину сигналов управления. Следовательно, заранее не задается определенная траектория, а каждый раз вычисляется в зависимости от текущих координат. При этом предполагается, что координаты объекта предварительно заложены в вычислительное устройство. На работу таких СУ не оказывают влияние искусственно создаваемые помехи. Это основное их достоинство. Кроме того, эти системы можно применять для управления БЛА с большой дальностью полета.
Определение собственных координат воздушным судном происходит ежесекундно при стандартной работе приёмника спутниковой навигационной системы (СНС). При перенастройке приемника частота определения собственных координат может быть увеличена. Практически же увеличение частоты не дает выигрыша в точности определения координат, так как скорость изменения координат накладывает ограничения на маневренность БЛА. Характер движения в течение одной секунды меняется мало, и положение БЛА можно достаточно точно рассчитать по его предыдущему положению, динамике полета и текущему маневру. В реальности стоит задача не только знать, где и в какое время находится объект, но и в зависимости от его местоположения выработать ответную реакцию.
Итак, ситуацию можно разделить на три условные категории. Первая - простейший случай мониторинга. Задача системы состоит в фиксации местоположения объекта с привязкой ко времени. Вторая - это расширение первой. Причем, в добавление к наблюдению, система вырабатывает внутри себя ответную реакцию (сигнализацию, набор вычислительных процедур, выработку внутренней команды). В этом случае время на выработку ответной реакции и на ее исполнение ничтожно мало по сравнению с дискретностью отсчета местоположения объекта. Третья категория - передача вычисленных во втором случае данных обратно на борт летательного аппарата. Например, с целью коррекции его движения. Здесь складываются времена передачи координат с летательного аппарата на пункт наблюдения, выработки команды и передачи команды обратно на борт аппарата.
Рассмотрим расположение командного элемента на пункте управления.
Одним из методов управления БЛА является пилотажный (рисунок 1.2).
Видеоинформация